|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
The RACH process is a cornerstone of establishing connectivity in any wireless communication system, but its implementation in Non-Terrestrial Networks (NTN) brings a unique set of challenges. In case of terrestrial networks, signals travel relatively short and predictable paths, but NTN systems involve complex interactions influenced by the vast distances of satellite orbits, rapid mobility of spacecraft, and dynamic environmental conditions. These factors create various hurdles such as significant propagation delays, Doppler shifts due to satellite motion, and the challenges of maintaining synchronization across a broad and ever-changing coverage area. Additionally, the inherent constraints of satellite communication such as limited spectrum resources and increased contention among devices, further complicate the RACH process. Addressing these challenges requires innovative strategies and adaptations, making the optimization of RACH in NTN a critical area for advancing global connectivity.
Potential Challenges in NTN RACHFollowings are various issues that may get involved in RACH Process in NTN environment. I think current 3GPP defines the specification only a small subset of these potential issues.
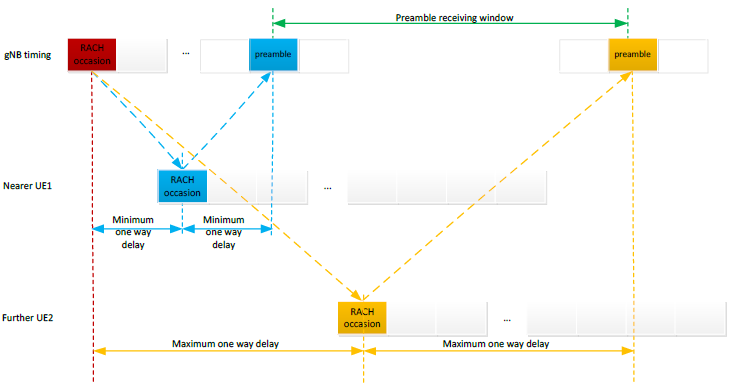
Challenges on Premable detection(4 Step RACH)In NTN, due to the varying distances between the User Equipment (UE) and the network, there can be a significant difference in the time it takes for a preamble to reach the network. There can be a few critical challenges due to this delay. Issue 1 : Differential Delay ChallengesDue to the significant differences in propagation delays between UEs at varying distances from the base station, the preambles transmitted during a RACH occasion can arrive at different times. This differential delay complicates the network's ability to accurately receive and process these signals, leading to potential ambiguities in identifying the associated RACH occasions.
<TR 38.821 - Figure 7.2.1.1.1.2-1: Preamble receiving window in NTN >
<TR 38.821 - Table 7.2.1.1.1.2-1: Maximum delay difference*2 for typical GEO and LEO cell >
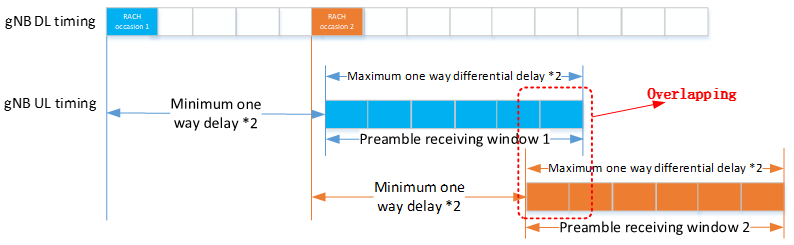
Issue 2: Overlapping RACH OccasionsWhen RACH occasions are configured with inadequate time intervals between them, the preamble receiving windows for consecutive occasions may overlap. This overlap introduces a significant challenge, as it creates ambiguity for the network. In such cases, the network may find it difficult to determine which RACH occasion a received preamble belongs to, complicating the process of accurately calculating the timing advance required for synchronization. This issue can severely impact the efficiency and reliability of communication in Non-Terrestrial Networks.
<TR 38.821 - Figure 7.2.1.1.1.2-2: Ambiguity on preamble reception at the network side >
Possible SolutionsThere are several potential solutions to address these issues as summarized below
<TR 38.821 - Table 7.2.1.1.1.2-2: Examples of feasible PRACH configurations for a typical GEO or LEO cell >
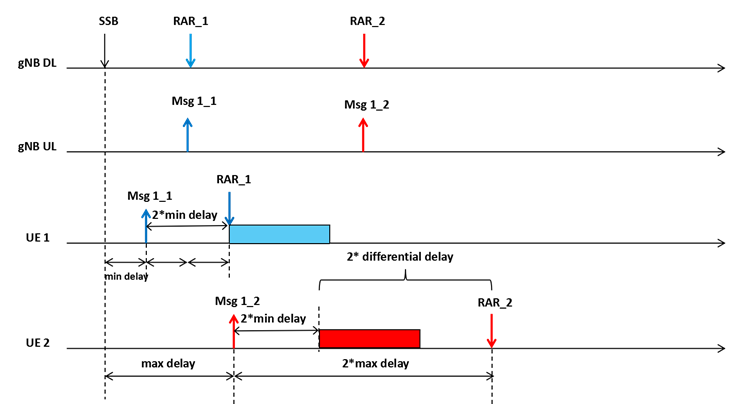
Challenges on Rach Response WindowIn the Random Access (RA) procedure, a User Equipment (UE) sends a preamble (Msg1) to the base station and then monitors the Physical Downlink Control Channel (PDCCH) for a corresponding Random Access Response (Msg2). In terrestrial systems, this response is typically received within a short, predefined time window (ra-ResponseWindow) of just a few milliseconds. However, in NTN, the propagation delays are much longer due to the large distances involved (e.g., communication with satellites in Geostationary Earth Orbit (GEO) or Low Earth Orbit (LEO)). This extended delay means that the RAR cannot be received within the terrestrial time window, resulting in failed RA attempts and the need for procedural enhancements. Simply put,
<TR 38.821 - Figure 7.2.1.1.1.2-3: RAR window in NTN >
The maximum differential delay varies by orbit type:
For UEs initiating RA from locations with significantly different propagation delays (e.g., cell edges), a response window that does not consider these delays risks missing the RAR altogether. Possible SolutionsTo address this challenge, two main adjustments to the ra-ResponseWindow are proposed:
Challenges on Contention Resoultion TimerDuring the random access procedure in cellular networks, after the User Equipment (UE) sends an RRC Connection Request (Msg3), it waits for Msg4, the contention resolution message, to determine if its random access attempt was successful. The duration for which the UE monitors for Msg4 is governed by the ra-ContentionResolutionTimer. This timer starts immediately after Msg3 is transmitted. In NTN scenarios, due to the long distances between the UE and the base station (e.g., satellite communication in GEO or LEO), the round-trip delay is much longer compared to terrestrial systems. While the maximum configurable value of the ra-ContentionResolutionTimer can technically cover these longer delays, this approach is inefficient and may unnecessarily consume power on the UE side. NTNs often require power-efficient operation, especially for UEs in remote or battery-constrained applications. Therefore, the default behavior of the ra-ContentionResolutionTimer must be adjusted to better align with NTN propagation delays while conserving UE power. Possible SolutionsA possible solution is to introduce an offset for the start of the ra-ContentionResolutionTimer in NTN scenarios. Instead of starting the timer immediately after Msg3 transmission, the timer would begin only after an offset period that accounts for the expected round-trip delay in NTN. This adjustment ensures the timer is active only during the period when Msg4 is expected to be received. By aligning the timer with the NTN-specific delays, the UE avoids unnecessarily monitoring for Msg4 during periods when it is unlikely to arrive. This saves power while still ensuring compatibility with NTN's longer delays.
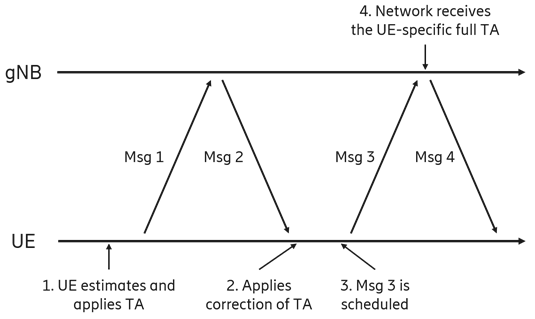
4 Step RACH FrameworkAccurate timing is crucial in NTN, and this 4-step process ensures that devices and the network can establish a common understanding of time despite the vast distances and dynamic conditions. It's a bit like a cosmic dance, where precise timing ensures a harmonious connection across the vastness of space. <TR 38.821 - Figure 7.2.1.1.1.2-9: Framework on 4-step random access procedure for UE with location information >
Before a device (UE) even begins to transmit its "hello" message (Msg1), it needs to figure out how long it will take that message to reach the satellite. This is like calculating the travel time for a postcard sent across continents.
Once the network receives Msg1, it responds with a Random Access Response (RAR) in Msg2, which includes a timing advance correction. This correction accounts for the UE�s estimation errors in Step 1, fine-tuning the alignment. Once the UE receives a response (Msg2) acknowledging its initial message, it refines its timing estimate. This is because its initial guess might have been slightly off, like arriving a bit early or late for an appointment. The UE adjusts its timing based on the feedback from the network, ensuring its subsequent messages are perfectly synchronized. The network now needs to schedule the UE's next transmission (Msg3), but it doesn't yet know the exact timing advance the UE is using. To avoid conflicts, the network plays it safe by assuming the maximum possible delay. This is like booking a meeting room for a longer duration to accommodate potential delays. In other words, the network schedules Msg3 (RACH response message) without yet having an absolute value of the UE�s specific timing advance. To handle this, the network must use a conservative approach, such as:
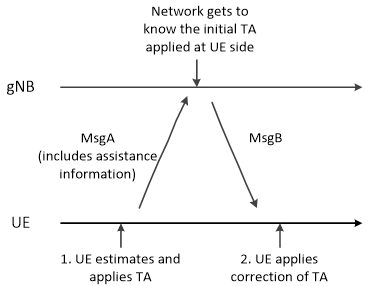
These strategies ensure Msg3 reaches the gNB reliably, even under the worst-case timing misalignment scenarios. Finally, when the network receives Msg3, it learns the precise timing advance of the UE. Both sides are now perfectly in sync, like two dancers flawlessly coordinated in their movements. This ensures smooth and efficient communication from this point onward. When the UE sends Msg3, the network finally receives and calculates the exact timing advance specific to the UE. At this stage, both the UE and the network are synchronized with a precise TA value, which is critical for the subsequent exchange of data. In cases where the UE has location information, it can optimize the process by compensating for a specific TA during Msg1. This specific TA is determined using the difference between the UE�s estimated delay and a reference point (d1 - d0). Meanwhile, the network compensates for a "common TA," defined by the distance between a reference point and the gNB. 2 Step RACH FrameworkThe 2-step RACH process significantly reduces the time it takes to establish a connection. By including assistance information in the initial message, the UE helps the network quickly understand its timing needs. This leads to faster and more efficient communication, which is particularly valuable in the dynamic environment of NTN, where delays can be significant. It's like having a more direct conversation, cutting through the noise and getting connected quicker. Overall, the 2-step RACH procedure offers a robust framework for managing timing advance in NTN, leveraging efficient message design and feedback mechanisms to overcome the unique challenges of satellite communication. This approach not only simplifies the RACH process but also enhances its reliability, paving the way for more effective satellite-based 5G deployments. <TR 38.821 - Figure 7.2.1.1.2-2: Framework on 2-step random access procedure for UE with location information >
In this streamlined process, the device (UE) still needs to estimate the initial timing advance before sending its first message (MsgA). However, there's a clever twist. Along with its "hello" message, the UE also includes extra information � a hint, if you will � about its estimated timing advance. This gives the network a head start in understanding the UE's position and timing. It's like including your location in a message so the recipient knows how long it took to arrive. Putting it in more detail, the process begins with the UE estimating and applying an initial timing advance before sending MsgA. MsgA serves a dual purpose�it includes a preamble transmitted on the PRACH and a payload transmitted on the PUSCH. This payload contains critical assistance information that allows the network to determine the initial timing advance applied by the UE. This step provides a significant advantage over the 4-step RACH procedure, as the network now has direct access to the UE's timing advance information from the first message. This eliminates the need for the network to rely solely on assumptions or maximum propagation delay estimates when scheduling subsequent transmissions. The inclusion of assistance information in MsgA simplifies the synchronization process, making it particularly suitable for NTN environments with long and variable delays. Following the transmission of MsgA, the UE monitors the network for a response within a configured window. If contention resolution is successful, the network responds with MsgB, which completes the RACH procedure. At this stage, the UE applies any necessary timing advance corrections based on the feedback received in MsgB. By the end of this step, both the UE and the network have a precise understanding of the UE-specific timing advance. This mutual awareness ensures that subsequent communication is tightly synchronized, even in the face of the high latency and dynamic conditions inherent to NTN. The primary benefit of this approach lies in its ability to streamline the RACH process while addressing key challenges of NTN environments:
3GPP Reference
Other References
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||